基于 ARM+FPGA+AD的高精度数据采集系统设计
随着图像处理、工业控制、无线通信等领域的飞速发
展,对数据采集系统的速度、精度等性能要求也越来越高。
这些要求都对数据采集系统的设计和实现提出了新的挑
战。目前数据采集系统的设计方案通常分为以下几类:1)
以微处理器单一控制芯片和 A/D转换器形式为主,该设计
方案简单,在对性能要求不高的应用场合为了降低成本甚
至可以采用集成 A/D 转换器的微处理器[1] 。2)采用通用
计算机配置数据采集卡的方式[2] ,通常需要开发计算机端
应用程序,可以完成复杂的计算,但不同的采集卡相应的驱
动程序不同,如果需求改变需要更换采集卡时,相应的应用
程序也需要重新开发。因此,该设计方案通用性差,实时性
不高。3)以 ARM 和FPGA或DSP和FPGA组合方式作为
采集系统的核心[3-5] ,ARM 处理器适合控制领域,DSP处理
器适合信号处理领域,FPGA器件由于其自身特点,适合高
速并行采集与处理领域,具有 ARM 或者 DSP等处理器无
法比拟的优势。这类组合方式结合各自特点,处理能力强,
应用范围广。通过以上分析,设计了 ARM 处理器和FPGA
器件作为数据采集系统的核心,ARM 处理器使用 Marvell
公司的PXA270,FPGA器件使用 Altera公司的 Cyclone系
列EP1C6,前端采集芯片使用 Ti公司的高精度、大动态24
位 A/D转 换 器 ADS1278进 行 模 数 转 换。ARM 和 FPGA
之间的数据交换采 用 双 口 RAM 芯 片 来 实 现 FIFO 功 能。
系统中 ARM 处理器作为系统控制核心,负责控制整个系
统工作时序、并将数据通过网络上传到服务器中进行存储。
FPGA负责 A/D转换器的模式配置,数据传输。该组合方
式结合 ARM 在控制方面和 FPGA 在采集方面的优势,具
有通用性强、配置灵活的特点。
2 系统设计
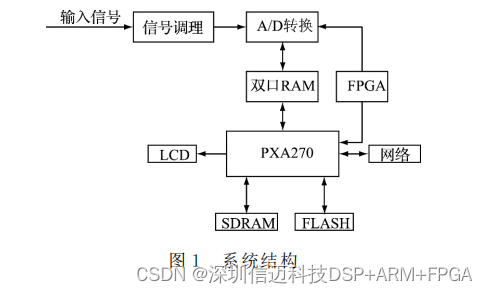
本系 统 硬 件 主 要 由 信 号 调 理 电 路、模 数 转 换 器
ADS1278、FPGA 器 件 Cyclone 系 列 EP1C6、双 口 RAM
IDT7205和处理器PXA270及外围电路[6] 组成,系统结构框
图如图1所示。输入信号经过信号调理电路后,进入 A/D
转换器进行数据转换,将模拟信号转换成23位尾数和一符
号位的数据,FPGA配置 A/D转换器并将转换的数据按照
顺序存储到双口 RAM 中,当转换数据存储满后中断 ARM
处理器,ARM 处理器将数据从双口 RAM 读出进行运算,
并通过网络接口将采集数据传输到服务器。
2.1 24位 A/D转换芯片 ADS1278
ADS1278[7] 是德州仪器(TI)公司推出的采样率高达
128KS/s、24位8通道同步采样Σ-ΔADC。支持多种工
作模式,内部集成线性相位数字滤波器,数据输出接口支
持SPI或可选帧同步,便于与 FPGA 互连。可满足国防、
航天和医疗应用。
ADS1278转换器内部集成的数字滤波器通过奈奎斯特
采样将输入信号抽取为长度为1比特的高分辨率数字信
号。8通道输入信号分别进入独立的8个 A/D转换器,它
内部由高阶斩波器、数字滤波器、调制器组成,可将输入模
拟信号经过高阶滤波器后得到数字信号。
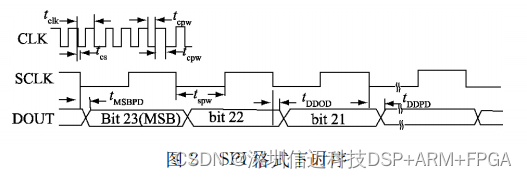
ADS1278 的 MODE [0..1]、FORMAT [0..2]、
SYNC、CLK、SCLK、DRDY、DOUT[8..1]引 脚 分 别 于
FPGA 的IO 口 相 接,其 中,MODE[0..1]引 脚 状 态 决 定
A/D的工作模式,FORMAT[0..2]引脚状态决定数据输
出格式选择,CLK 引 脚 需 要 输 入 A/D 转换器工作时钟,
SYNC、SCLK、DOUT[8..1]引脚是控制 A/D转换的数据
串行输出帧同步、时钟、8通道数据。图2为 ADS1278的
SPI格式下,时钟和数据时序图。
2.2 ARM 与FPGA的接口设计
本 系 统 核 心 采 用 ARM 和 FPGA 的 组 合 方 式,在
ARM 和 FPGA 之 间 采 用3片 双 口 RAMIDT7205进 行
24bit数据传输,其中,FPGA 器件控制 A/D转换,并将转
换数据按照一定顺序存储到双口 RAM 中,当数据存储完
后将中断 ARM,ARM 将双口 RAM 中的数据进行读取,
比使用 FIFO传输的方案降低了成本、提高了数据传输的
吞吐量。
本系 统 中 FPGA 的设计作用如下:复 位 并 配 置
ADS1278的工作 模 式,FPGA 内部设置一个地址加法器
控制将 A/D 转换器的数据写入双口 RAM 中,当 双 口
RAM 写满 后,大 小 24 KB,地址加法器复位。ARM 与
FPGA 的接口方式 有 很 多 种,如IIc、spi等串行接口或总
线等并行接口,串行接口由于本身的局限性限制了其在大
数据量、实时数据的传输的应用,而总线的形式更合理一
些,稳定性较之更好一点。但 ARM 与 FPGA 通 过 地 址、
数据、控制总线直接连接的方式在大数据传输时会影响系
统的效率,因 此,在 ARM 与 FPGA 之 间 采 用 双 口 RAM
进行连接的方 式,ARM 与 FPGA 异 步 工 作,提 供 了 系 统
的效率。其接口如图3所示。
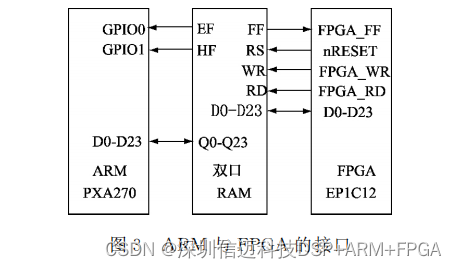
FPGA 的 控 制 信 号 WR、RD、nRESET 与 双 口 RAM
IDT7205的复位信号 RS、读写信号 WR 和 RD 连接,数据
总线 D0~D23与双口 RAM 的数据总线连接,FPGA 通过
内部地址加法器依次将将 A/D转换器的数据串并转换后
写入双 口 RAM 中。双 口 RAM 的 EF、HF 信 号 分 别 与
PXA270的 GPIO0和 GPIO1连接,接受数据写满后产生
的中断。PXA270提 供6个分区的静态存储器 Bank0~
Bank5,设计将双口 RAM 的存储空间映射到 PXA270的
Bank3上。
3 驱动程序设计
为了实现 ARM 与 FPGA 通过双 口 RAM 的 数 据 传
输,需要设计嵌入式 Linux下的驱动程序[8]。当 FPGA 将
数据写到双口 RAM 中,根据双口 RAM 中数据的状态中
断 ARM 处理器进 行 数 据 读 取。这一过程主要需要中断
和总线驱动程序配合。
在中断驱 动 程 序 中,通 过request_irq()函 数 为 双 口
RAM 的中断分配中断请求(IRQ)号,当处理器检测到这
一IRQ 号对应的中断产生时,将启动该IRQ 对应的中断
服务例程[9]。IRQ 号与中断处理例程是一一对应的,在系
统/porc/interrupts文件中可以为设备选择IRQ 号。FP-
GA 将 A/D转换的数据写入双口 RAM 后,当数据写满后
会中断 ARM 处理器,ARM 会响应中断处理例程,读取双
口 RAM 中的 数 据。中断处理例程首先要清除 PXA270
的中断寄存器相应的位,需要通过对状态寄存器相应位进
行写 操 作,这是为了能够继续响应双口 RAM 产 生 的 中
断。然后是设置数据传输标志位,当主程序中检测到标志
位,进而调用总线驱动程序进行数据传输,这种工作方式
可以避免中断处理例程的冗长,提高系统传输效率。
由于应用程序工作在用户空间,它无法完成对总线的
操作,而驱动程序工作在内核空间,可完成对总线的操作,
因此,在总线驱动程序中,必须支持应用程序对总线的操
作,以完成数据的传输。传统的 Linux应用程序需要通过
总线驱动程序完成对总线空间的访问方法是通过2个函
数完成用户空间与内核空间之间的数据传递,其中内核空
间向用户空间传输数据使用copy_from_user函数,用户空
间向内核空间传输数据使用 copy_to_user函 数。copy_
from_user,copy_to_user等。这种方法虽然能完成2个空
间的数据传输,但是效率不高,最好的方法是将内核空间
能访问的物理地址直接映射到用户空间,Linux内核提供
了remap_page_range函数,应用程序对该用户空间的地
址访问相当于直接对物理地址的访 问[9]。本 文 的 总 线 驱
动程序就是直接映射的方法,来完成快速的读写。
下面是驱动程序代码段,它使用remap_page_range()
函数在驱动程序中完成 mmap系统调用中物理空间到虚
拟空间的映射,remap_page_range()函数原型如下:
intremap_page_range(vma_area_struct*vma,un-
signedlongfrom,unsignedlongto,unsignedlongsize,pg-
prot_tprot);
remap_page_range()函数的调用需要初始化。
虚拟内存空间指针vma、起始地址、物理地址、映射区
域字节 数 等 参 数。首 先 计 算 物 理 地 址,然 后 通 过 右 移
PAGE_SHIFT位,本系统使用 PXA270的 Bank3的物理
空间,起始地址0x0c000000,大 小 为4KB 映 射 到 虚 拟 空
间。驱动程序中,还需要判断虚拟内存大小和偏移了指定
距离后物理内存的大小,如果虚拟内存过大,应该返回并
提示映射超出允许的内存空间。
调用remap_page_range()函数过程如下:remap_page_
range(vma,vma->vm_start,0x0c000000 + vma->vm_
pgoff<< PAGE_SHIFT,vma->vm_end- vma->vm_
start,pgprot_noncached(vma->vm_page_prot));
应用程序中调用 mmap系统就是对 mmap()函 数 的
参数初始化。mmap()函数原型如下:
void*mmap(void*start,size_tlength,intprot,int
flags,intfd,off_toffset);
首先将文件描 述 符fd指 定 的 设 备 文 件 与start处 开
始的内存空间关联,通常将start设为0,mmap()函数返回
实际关联 的 内 存 地 址。length 为内存映射的字节长度,
prot为内 存 保 护 类 型,flag为 映 射 类 型,MAP_SHARED
标识符表示与其他所有映射这个对象的进程共享内存区
域。本设计调用 mmap()函数过程如下:
base= (unsignedlong*)mmap(0,0X100,PROT_
READ|PROT_WRITE,MAP_SHARED,fd,0);
4 系统实验结果分析
本系统中,FPGA 外部晶振频率采用32.768MHz,经
过内 部 16 分 频 器 后 得 到 2.048 MHz 时 钟 频 率 作 为
ADS1278的工作时 钟。ADS1278完 成8通 道24位 精 度
的采样 传 输 大 约 需 24μs,采 样 数 据 被 FPGA 写 入 双 口
RAM 基本在采样结束后同步完成。当双口 RAM 数据被
写满后,中断 ARM 处理器进行数据读取,ARM 的工作频
率为 520 MHz,外部总线时钟频率为 104 MHz,配 置
PXA270外部Bank3的 MSC寄存器为0x7ff4满足系统对
双口 RAM 时序读写的需要。
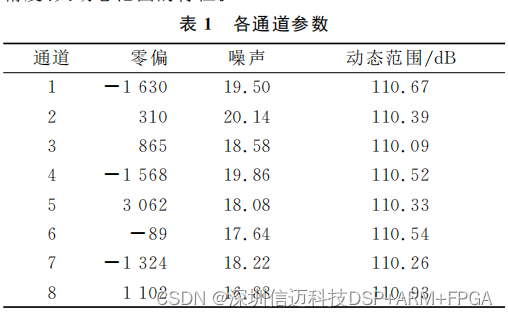
为了提高采集精度,首 先 需 要 对 A/D 转 换 器 进 行 零
偏校准,零偏校准后,通过动态范围计算公式20×lg(信号
电压/噪声电压)得到各通道实际动态范围如表 1所 示。
其中零偏电压以转换后的数字形式给出。从表1中动态
范围一列中可以看出,系统各通道实现的动态范围都接近
A/D转换器24位采样精度时的理想动态范围111dB[7],
测量结果表明本文设计的系统可充分发挥 A/D 转换器高
精度、大动态范围的特性。
信迈提供ARM+FPGA+AD的设计与批量生产解决方案。