基于ZYNQ MPSOC船舶数据采集仪器设计(一)总体设计方案,包括振动、压力、温度、流量等参数
本文根据舱室内数据集中采集与记录管理需求对该装置的硬件平台性能、
软件逻辑设计等方面进行分析,据此制定总体方案。硬件平台基于集成 ARM
与 FPGA 架构的 ZYNQ MPSoC (XCZU5EV) 处理器,根据舱室多参量数据集中
采集需求,设计多通道模拟量高精度采集电路与多协议通信接口电路。通过在
XCZU5EV的 PL(Programmable Logic)端完成各模拟量采集通道 AD芯片的驱
动逻辑设计,实现振动、温度、压力等共44路高精度模拟量采集功能;同时设
计 UART、CAN 总线通信协议的驱动逻辑,实现多路 RS232、RS422、RS485
接口以及 CAN 总线接口的数据收发、解析组帧与时间戳标记功能。各通道均
配有大容量 FIFO 缓存且功能参数灵活可调,使其适用于不同舱室与设备。
根据数据记录管理需求,在 ZYNQ_PS 端移植并定制 Linux 系统,使能
NVMe、USB 3.0、网口等外设驱动,完成数据记录与数据导出等软件开发,实
现各通道采集数据高效有序的存入大容量 SSD 固态盘中,并且可通过 USB 3.0
接口实现数据自动导出功能。同时开发上位机软件,使用千兆以太网进行数据
交互,可实现各通道参数的灵活配置与可视化界面。
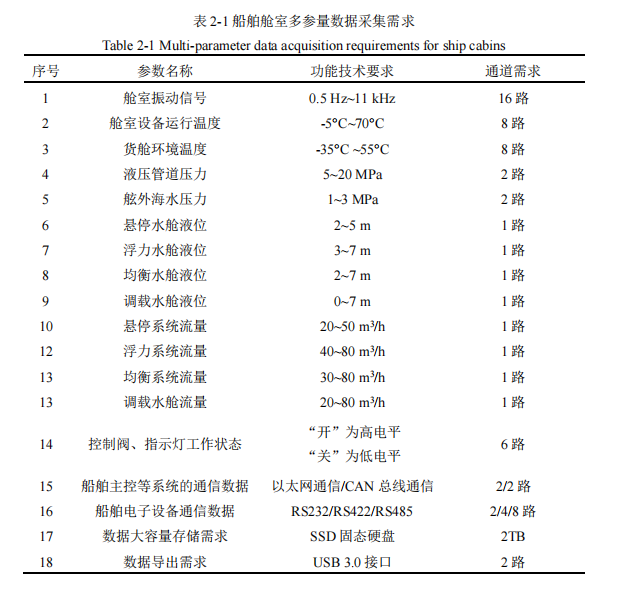
2.1 舱室数据信号采集需求分析
根据在研新型船舶对数据采集记录装置的需求以及各舱室环境与设备运行
实际情况,需要采集的信息按照信号类型可分为模拟量信号、开关量信号、通
信信号等。同时,针对采集到的海量原始数据,必须要对其进行数据管理,包
括数据有序存储、查找等记录功能以及导出功能。
具体功能需求如下:
(1)舱室内模拟信号需求分析:舱室设备的模拟信号主要为振动、温度、
压力、液位与流量等模拟量信号。振动信号包括动力设备发动机振动以及船体
振动等;温度信号主要包括各舱室环境温度、设备轴承温度以及冷却水温度等
[43]
;压力主要是设备液压系统管道压力以及舱体外海水压力;液位信号与流量
信号则主要是舱室内各水舱的参数。
(2)舱室内开关量信号需求分析:舱室设备开关量信号主要包括各类阀
门及指示灯等工作状态。关键阀门主要涉及液压系统阀门、冷却水阀门和通气
阀门等[44]。
(3)舱室内通信信号采集需求分析:舱室内各设备的通信数据流同样至
关重要,需要将其原始数据完整的接收并记录,供后续研究分析。船舶工业领
域主要使用的工业控制总线为工业以太网与 CAN 总线[26],分别用于与船舶平
台管理系统数据交互实现网络指令接收以及配电系统等数据通讯;针对于舱室
内部分仪表、控制单元或特定传感器等依赖串行接口的设备,需要提供如
RS232、RS422、RS485 串行接口,并且需要具备可调特殊波特率以满足高端
设备需求,以确保设备之间的兼容性和通信可靠性[45]。
(4)数据记录管理:面对海量采集的数据,记录装置需具备大容量存储
能力,方便离线分析与长期保存,并且需要实现对数据的有序存储与管理,保
证采集数据的完整性与灵活性,为管理平台提供数据解析、查找及删除功能。
(5)数据导出功能:为工作人员及时且安全的实现本地数据的高效传输,
需要设计自动高速传输接口,方便数据的快速导出[46]。
2.2 性能指标要求
(1)处理器平台:
① 时钟频率:≥1GHz;
② RAM(DDR):≥4GB;
(2)采集单元:
① 振动信号采集通道:≥16 路,频率范围:0.5 Hz~11 kHz,测量精度:
1.0% FS;
② 温度信号采集通道:≥16 路,测量误差±0.5℃,范围-35°C~70°C;
③ 压力信号输入:≥4 路,测量精度:0.1% FS;
④ 液位信号输入:≥4 路,测量精度:0.1% FS;
⑤ 流量信号输入:≥4 路,测量精度:0.1% FS;
⑥ 开关量输入:≥6 路,高电平(15~40 V),低电平(0~5 V)。
(3)通信单元:
① RS232:≥2 路,缓存≥255 byte,通信参数可配置;
② RS422:≥4 路,缓存≥255 byte,通信参数可配置;
③ RS485:≥8 路,缓存≥255 byte,通信参数可配置;
④ CAN 总线:≥2 路,缓存≥1024 Byte,通信参数可配置;
⑤ 千兆以太网接口:≥2 路;
⑥ USB 3.0 接口:≥2 路;
(4)数据管理单元:
① 存储空间:≥2 TB,采用固态硬盘;
② 记录功能:存储、查询、解析、删除;
③ 导出功能:自动快速导出。
(5)供电电源:
① 供电电压:额定电压 24 V;
② 供电功率:≤80W。
(6)环境适应性:
① 工作温度:-10℃~+50℃;
② 贮存温度:-20℃~+70℃;
③ 工作湿度:≤95%(+30℃)。
2.3 总体方案设计
本节根据功能需求分析以及设定的性能指标来确定舱室多参量数据采集记
录装置的总体方案设计,包括硬件总体方案设计与软件总体方案设计。
2.3.1 硬件总体方案
硬件总体设计方案如图 2-1 所示,主要由主控板卡、采集板卡、通信板卡
构成。
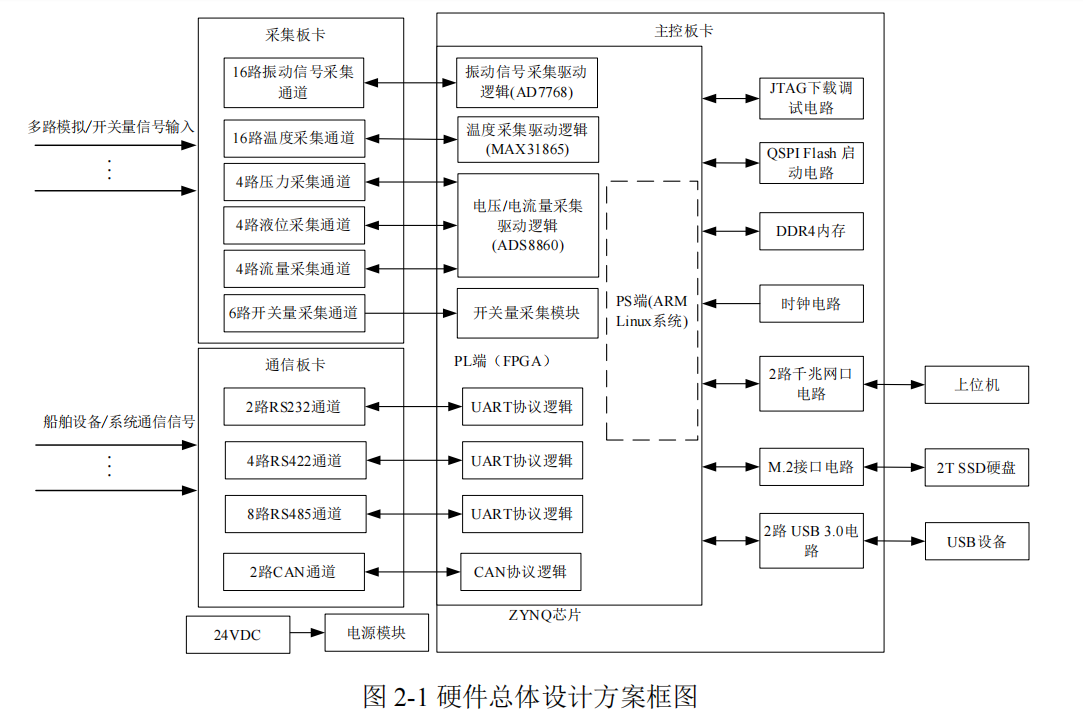
(1)主控板卡
主控板卡主要围绕主控芯片的外围电路展开,并集成了多项关键功能电路。
具体如下,板卡配备两路千兆以太网接口,实现与船舶平台管理等系统高速通
信;采用 m.2 接口连接 SSD 固态盘,确保数据存储的高效性与可靠性;同时,
集成两路 USB 3.0 接口,用于本地数据的高速传输。
(2)采集板卡
采集板卡负责实时采集舱室的各类物理信号并转换为数字信号供主控芯片
处理。针对模拟量信号中振动和温度信号,设计高精度专用采集通道,确保信
号低噪声、高保真度;对于压力、液位和流量信号,设计通用模拟量采集通道,
为输出 0~10 V 模拟电压和 4~20 mA 模拟电流量的工业通用传感器提供了灵活
的接口,确保采集系统的通用性和适应性。针对开关量信号,采集板卡配备了
6 路光电隔离采集电路,实时采集舱室各阀门及重要设备的开关状态,确保船
舶各系统的协同运行。
(3)通信板卡
通信板卡在该装置中负责实时完整的获取来自不同设备及系统的通信数据,
设计了多路多协议的通信接口,用于提升兼容性。通过设计 2 路 RS232、4 路
RS422、8 路 RS485 以及 2 路 CAN 总线接口,实现舱室内各信息流的全面接收,
为实现通信数据流的记录工作提供保障。RS232 接口用于装置调试;RS422 接
口可用于实现与舱室内 GPS 导航设备等进行点对点连接,抗干扰能力强;
RS485 支持多点通信,用于连接船载工业设备及传感器网络;CAN 接口用来接
入到舱室 CAN 总线通讯网络中,可实现监听发动机控制系统、载荷配电系统
等关键设备的通信数据。
(4)电源模块
为确保系统的稳定性并避免电流波动影响各板卡的正常运行,本系统采用
了独立电源模块设计。每块板卡均配备独立的电源电路,系统整体通过外部
24V 直流电源供电,并通过多个电压转换芯片为各板卡生成所需的不同电压。
由于不同板卡对电压的需求各异,具体的电源设计方案根据每个板卡的功能和
要求进行优化。
2.3.2 软件总体方案
软件总体设计方案如图 2-2 所示,主要由 ZYNQ 的 PL 端硬件接口驱动逻
辑设计和 PS 端 Linux 系统软件开发两部分构成。
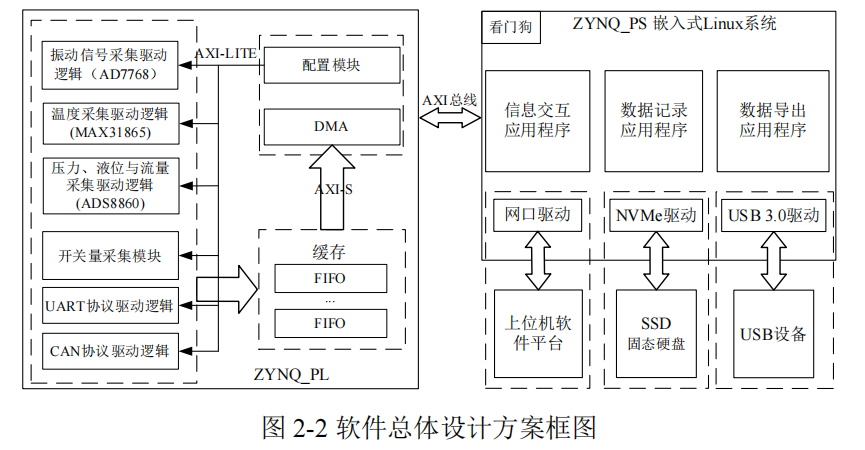
ZYNQ_PL 端负责完成采集板卡和通信板卡的驱动逻辑设计,且各个通道
参数均可灵活配置并配有大容量 FIFO 缓存,保证设计灵活性与数据完整性。
首先完成各采集通道 AD 芯片的驱动逻辑设计,实现采集通道的高精度模数转
换。然后针对通信通道:设计 CAN 总线协议驱动逻辑,实现 CAN 2.0 格式数
据的收发、解析组帧和时间戳标记功能;设计 UART 协议驱动逻辑,实现
UART 数据收发、可调特殊波特率用于连接特殊设备等功能。
ZYNQ_PS 端与 PL 端通过 AXI 总线进行数据交互,可通过 AXI-Lite 总线
实现 PL 端通道的配置,并借助 AXI-DMA 模块使数据高速传输至 PS 端。
ZYNQ_PS端移植 Linux系统,开发数据记录与数据导出等应用程序,提升
数据管理与调度效率。数据记录应用程序可实现将采集到的原始数据从 DDR
中有序的以二进制形式存入到大容量 SSD 固态硬盘中。数据导出应用程序通过
USB 3.0 接口将 SSD 固态盘中的数据快速导出到 USB 设备中。同时开发上位机
软件,通过以太网连接,实现各通道参数灵活配置与数据可视化功能。
该软件架构通过软硬件协同设计,既发挥 PL 端的硬件可编程优势,又借
助 PS 端 Linux 系统实现复杂数据管理与交互功能。
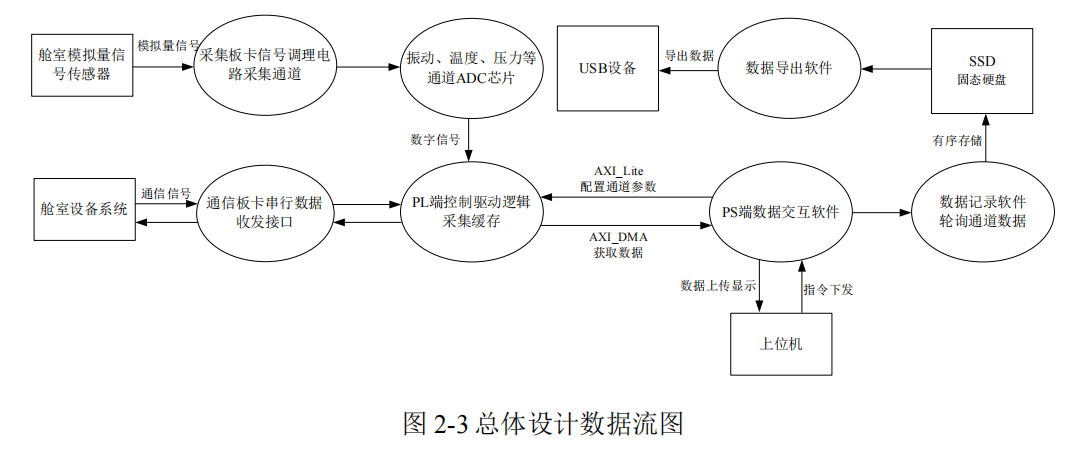
本文总体方案设计的数据流图如图 2-3 所示,包含舱室内多参量数据的采
集、传输、存储与导出设计。
2.4 可靠性设计
为确保船舶舱室多参量数据采集记录装置在极端环境下的高可靠性和稳定
性,本设计采用以下可靠性策略:
(1)ZYNQ 主控制芯片:选用 ZYNQ-5EV 处理器,其强大的处理能力和
稳定性支持系统长期可靠运行,为复杂任务和未来升级提供保障。
(2)独立电源模块设计:每个板卡配备独立电源模块,有效隔离电源故
障,减少电流波动对系统的影响,并遵循严格的上电顺序设计,降低故障发生
概率,提升整体稳定性。
(3)硬件与软件模块化设计:采用三层板卡模块化设计和软件功能模块
独立开发,便于故障定位与隔离。当某一模块发生故障时,可快速更换维修,
提高系统的可靠性和可维护性。
(4)冗余设计:系统融入冗余通信接口,包括两路千兆以太网接口、两
路 USB 3.0 接口和两路 CAN 总线接口,确保单一通信路径失效时可切换至备用
路径,增强数据传输和通信链路的可靠性[47]。
(5)看门狗程序:通过看门狗程序实时监测系统运行状态,检测到异常
时自动触发恢复机制,提升系统容错能力,减少人为干预需求。
(6)元器件选型:优先选用工业级与军工级元器件,确保硬件的高质量
和长期稳定性,显著降低因元器件老化或失效导致的故障风险。
(7)“三防涂层”工艺处理:实施防水、防尘、防腐蚀工艺,提升设备对
恶劣船舶环境的适应能力,确保硬件在极端条件下的可靠性。