信迈TI AM5728 DCAN 驱动详解
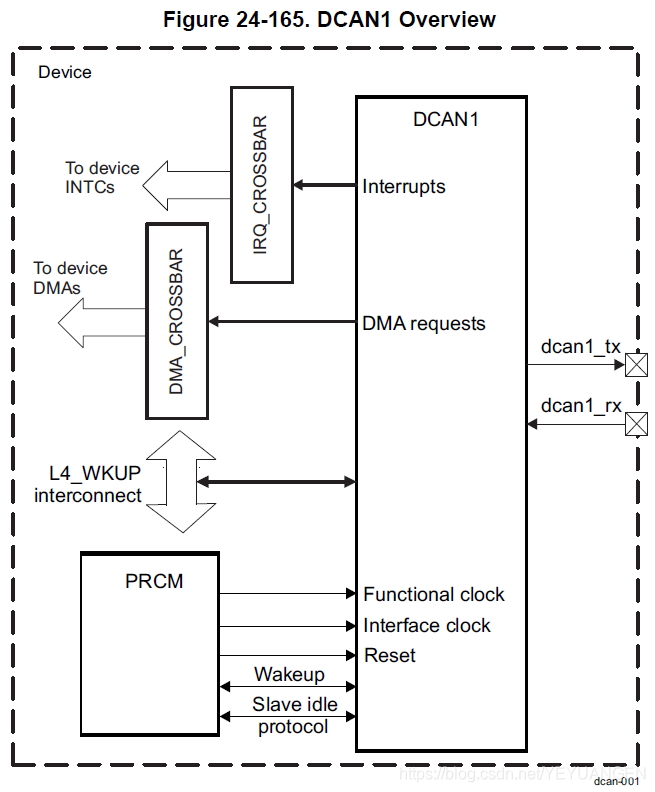
设备树DTS:
can @481cc000 {
compatible = "ti,dra7-d_can";
ti,hwmods = "dcan1";
reg = <0x4ae3c000 0x2000>;
syscon-raminit = <0x9 0x558 0x0>;
interrupts = <0x0 0xde 0x4>;
clocks = <0x10d>;
status = "disabled";
phandle = <0x209>;
};
can@481d0000 {
compatible = "ti,dra7-d_can";
ti,hwmods = "dcan2";
reg = <0x48480000 0x2000>;
syscon-raminit = <0x9 0x558 0x1>;
interrupts = <0x0 0xe1 0x4>;
clocks = <0x11>;
status = "disabled";
phandle = <0x20a>;
};
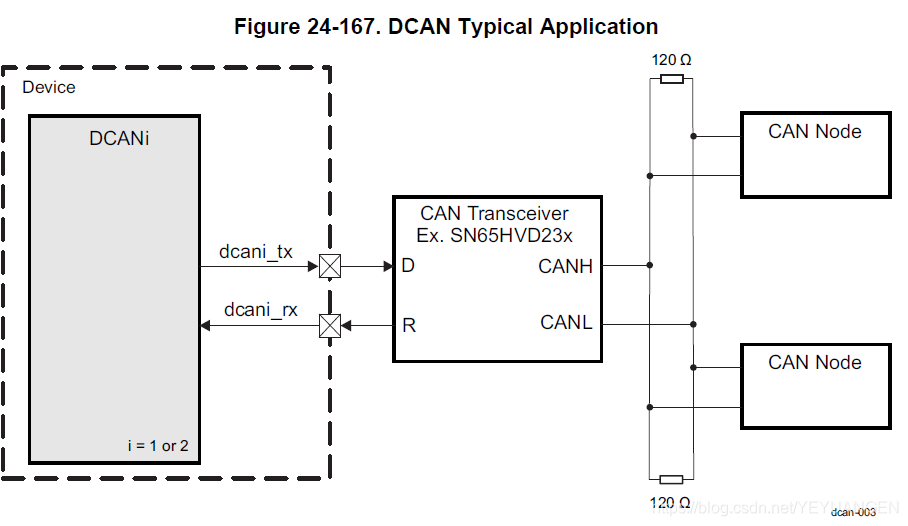
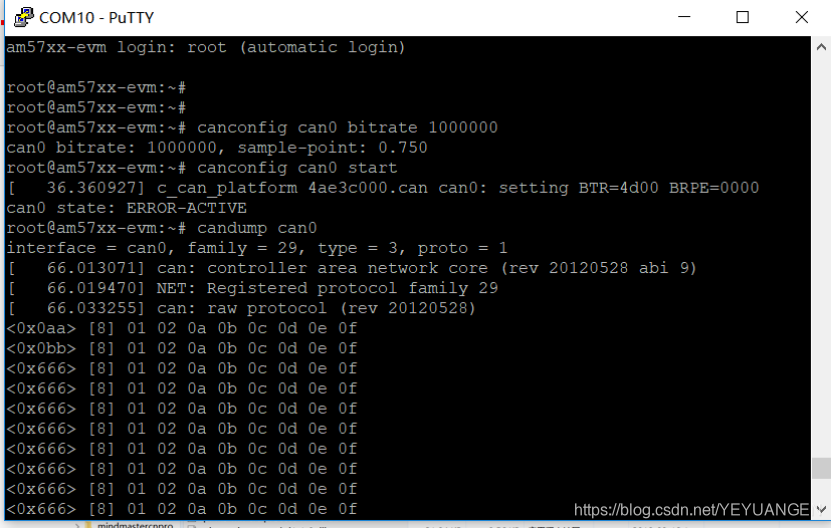
CAN总线测试方法
开发板 文件系统 下执行如下指令,配置 CAN0 总线(软件上的 CAN0 对应为硬件上的
CAN1)比特率为 1MHz,并启动 CAN 总线:
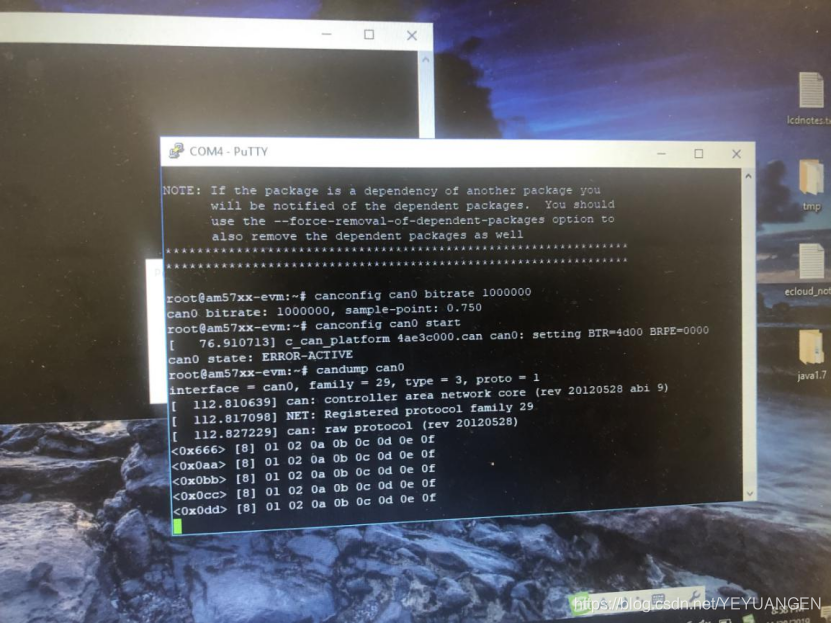
Target# canconfig can0 bitrate 1000000
Target# canconfig can0 start
执行如下指令,监控接收 PC 端发送的 数据 :
Target# candump can0
PC上自动 安装驱动
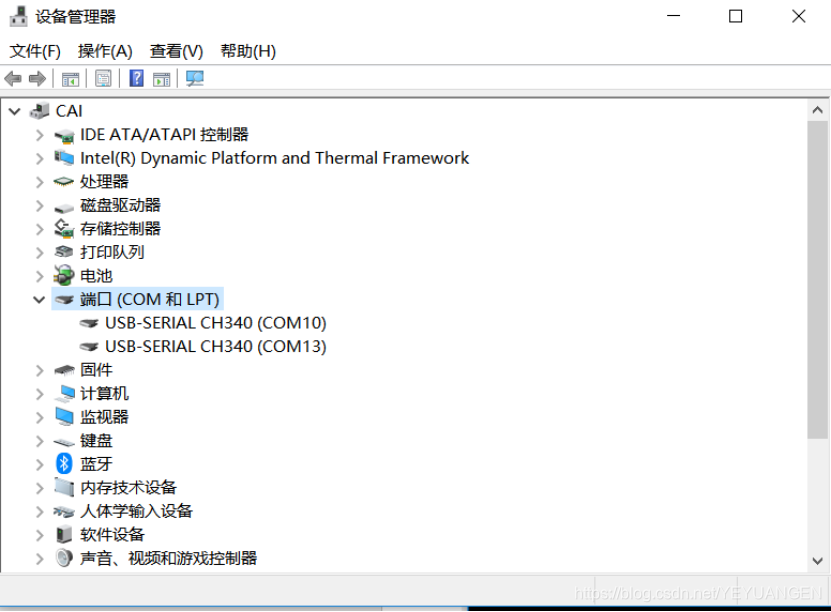
再打开调试仪器软件
一.先设置 com端,比特率为 1MHz,
二.任选数据 点发送 或循环发送
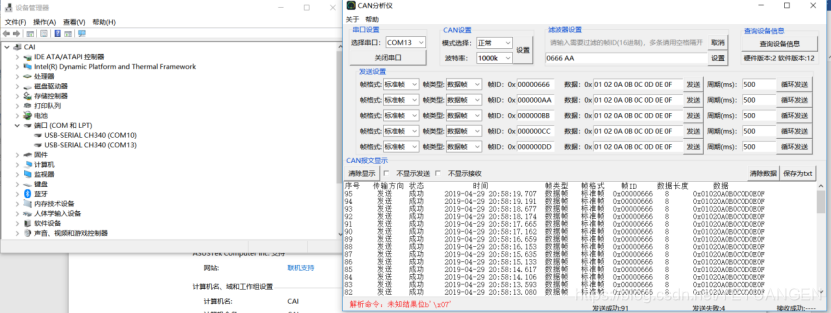
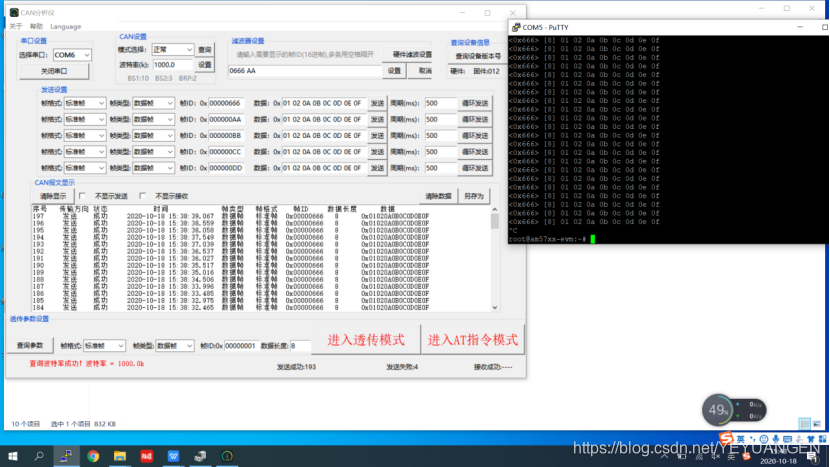
实例图


参考文章:信迈AM5728 CAN总线测试及SDK升级 https://blog.csdn.net/YEYUANGEN/article/details/94588789